As part of my PhD research, involving the characterisation of the propagation environment at the SKA Karoo, time was spent developing a multi-copter RF metrology vehicle. A dramatic autopilot failure in our early prototype caused a the multi-copter to fly away forever. This event gave us a clean slate to do a full redesign upon what we have learned. One of the main problems with RF metrology using a multi-copter is the effect of the multi-copter itself on the measurement, which at this point has not been adequately addressed in research. Therefore, we set out to design a vehicle that could be appropriately de-embedded from a measurement.
The performance of antennas onboard these vehicles are in most cases unknown or assumed. These antennas have a specific characteristic pattern which could cause significant fluctuations in the measured signal, depending on its orientation. Even if the orientation was kept constant, the antenna patterns are sensitive to changes in metallic structures of the vehicle. An excellent example of this is the replacement of batteries after a flight. The replacement battery might have slightly different dimensions, position and will most certainly perturb some of the ubiquitous wires in the system.
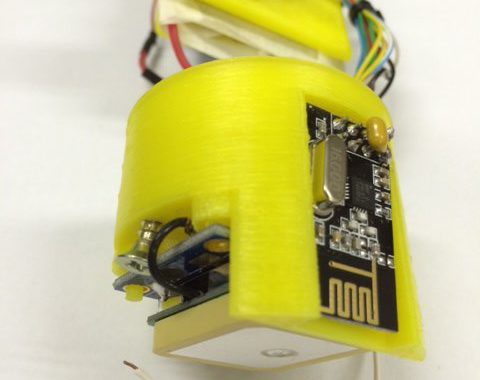
Our approach was to shield all of the subsystems of the vehicle in a metallic enclosure. This shielding gave us a platform which had a predictable antenna pattern. Also, by closing the complex metallic environment, accurate antenna simulations have been made possible. Additionally, FEMU 2.0 also boasts a quasi-isotropic antenna pattern and a bandwidth of 260 MHz to 960MHz (See the paper for more information on this).
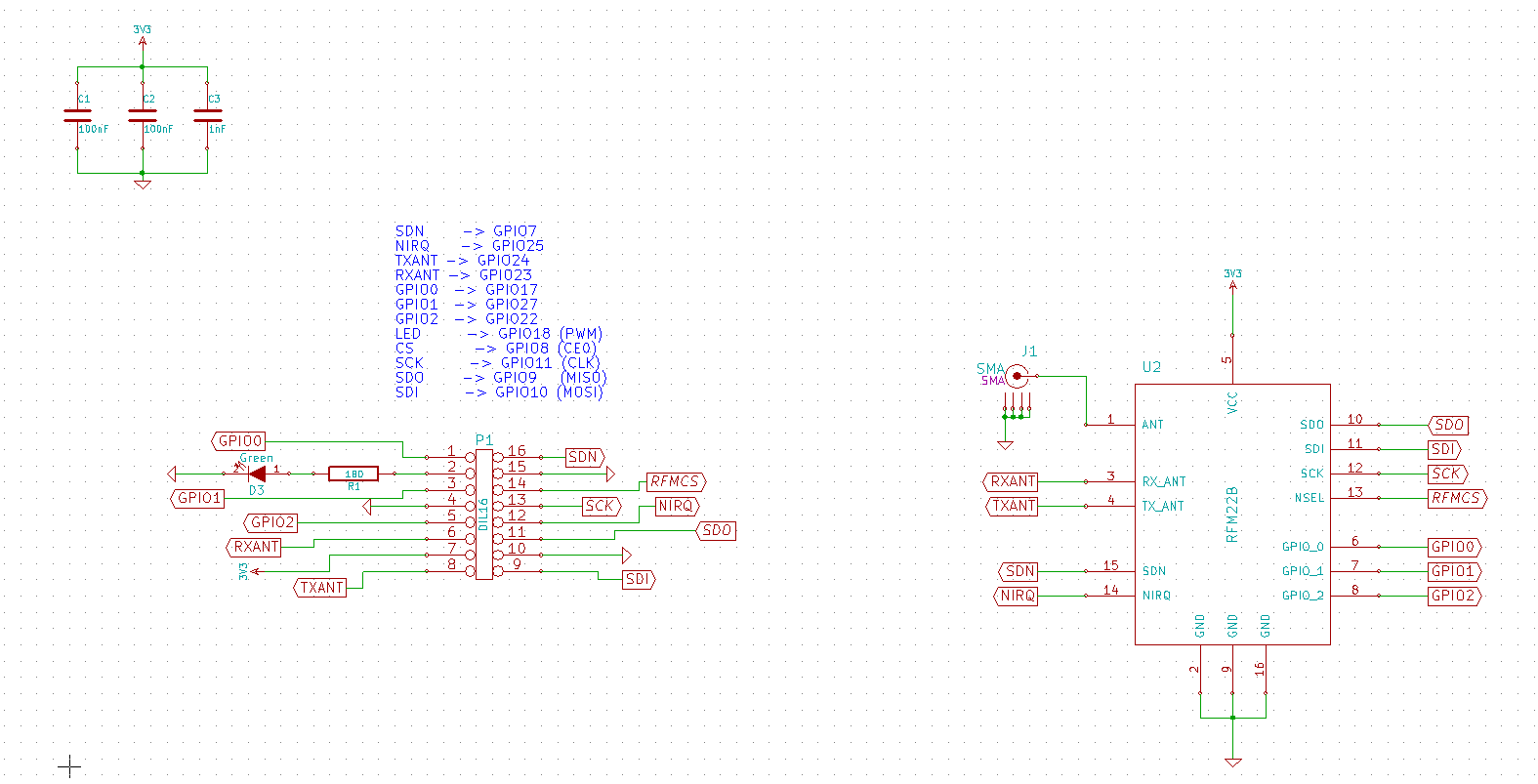
Hopefully, this will pave the way for RF metrology using multi-copters. If done correctly this could significantly speed up measurement time and deliver measurements that are spatially continuous. The entire vehicle has been constructed from 3D printed parts and local hardware supplies. The electronics, receiver and antenna systems can all be made available if another research group is interested in further developing the project.
Below are two images showing FEMU 2.0 during setup and measurement.