
Early 2016 was the year Tesla started showing off their new Model 3 electric car. Unfortunately, my financial situation did not allow me to own such a vehicle. As a result, I settled for the next best thing, building an incredibly overpowered electric skateboard.
Most of the drive system was ordered as a kit from Enertion (based in Australia). The kit contained dual 6355 brushless dc motors. Both motors were controlled using the popular VESC. The battery was self-assembled out of 40 18650 25R Samsung cells in a 10s4p configuration. I used one of the battery boxes available at Enertion to create a clean build without too much effort. The deck itself was ordered locally.
Below are some photos of the build process:

I will be adding some indicator LEDs to the top of the board, so the grip tape had to go.

Assembled drive system

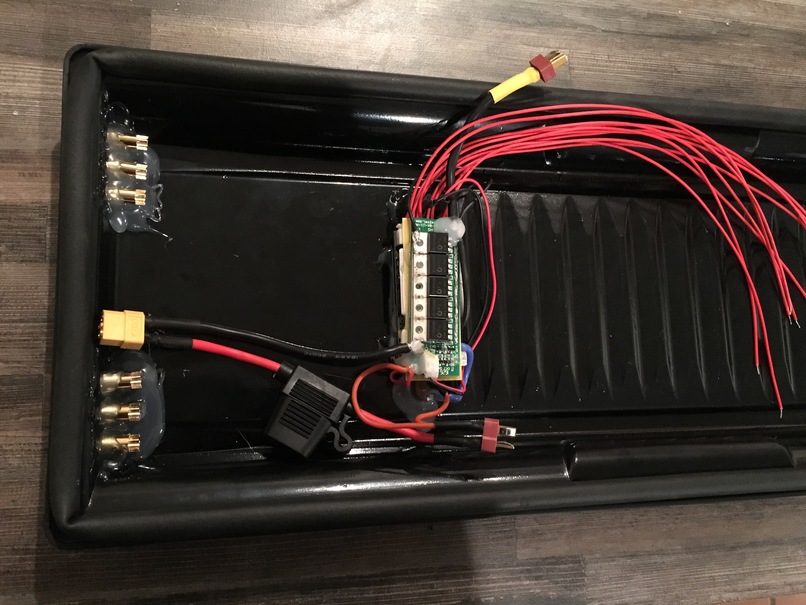
Hot glueing ESC banana-plug connectors in the battery box

Routing a slot for the neo-pixel LED strip

Added inserts to the deck for mounting the battery box

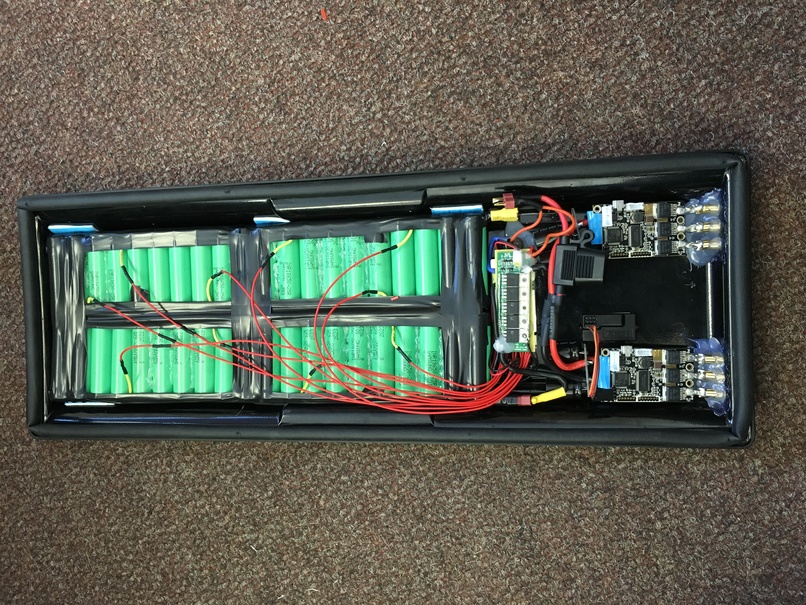
Soldering the Li-ion battery pack

Finished 10s4p Li-ion pack

ESC’s and battery pack installed in battery box
Sealing LED strip using clear silicone


Replacing grip tape, leaving thin slot for LED strip

The LED strip was controlled using an ESP8266. It indicates speed, voltage, current as well as wifi connectivity. The plan was to upload data to a website using an MQTT system. However, excitement took over, and nothing except riding the board was accomplished after this. Since finishing the build, I estimate a total travel distance of more than a 1000 km commuting to and from work. The next post should go into more detail about the LEDs strip with some code and hopefully a working telemetry uploading feature.