Another sensor needed during navigation and control was added to the IMU board. This sensor, a magnetometer, is responsible for measuring the orientation using the earth`s magnetic field. In a plane setup, the current heading can be easily determined by making use of consecutive GPS measurements. On the other hand, a quadcopter does not need to stay moving all the time and therefore needs a sensor that is able to measure its heading while hovering.
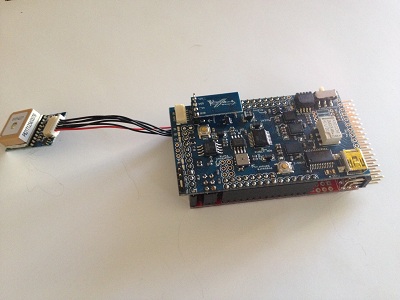
The compass is mounted to an I2C channel on the top of the IMU board. Seen as a small extra daughter board. Running the mission planner command line interface some data was gathered to prove that the compass is functioning correctly.
Command Line Interface magnetometer test data