After a number of flights in stabilize mode with a very stable vehicle, it was decided to test the rest of the flight modes. Our goal was to build this into a measurement platform which necessitates the use of the auto modes. Therefore, we went to an open test field near Stellenbosch where we switched the quadcopter to loiter mode. The latter action caused the quadcopter to ascend at full throttle with no sign of stopping. After landing and trying again the same thing happened.
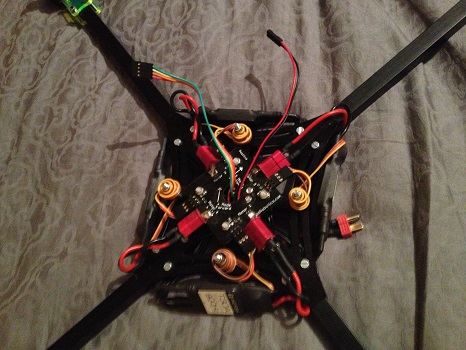
After this slightly unsuccessful test, I learned that in the newer APM firmware versions vibration can be an issue and can cause the observed behaviour. I decided to start eliminating all the vibration I could find. Starting with the motors I measured the vibration with an app called “vibration on my iPhone”. Spinning each motor independently while strapping the phone onto the motor arm I could monitor the intensity of the vibration and start balancing the motors in the same manner as the video I found below.
After some experimentation, I realized that the motors without any nut and spinner were perfectly balanced, however, as soon as the spinners are added it would put the motor extremely off balance. As a result, I balanced each spinner with a piece of tape, much like they balanced the motors in the video. This meant I now had 4 non- vibrating motors. At this stage, I did not have a prop balancer and had to hope my cheap colourful gem-fan propellers were reasonably balanced.
To actually test if there were any relative improvement I enabled the IMU data logging onboard the APM. I downloaded the log after each change to relatively measure what performance difference the modification had.
It can be seen in the comparison that there was initially also some experimentation with different APM mountings such as being screwed down, double-sided tape, moon gel pads and lastly, the configuration that is still being used, dampening pads below the entire electronics platform. Remember that these modifications were done before balancing the spinners, note that it almost seems as if the vibration got worse with the different platforms except the moon gel. It should also be stated that with the new dampening pads the whole layout of the vehicle was changed. A motor which was slightly damaged in the previous crash was also replaced with more negative results. However, balancing the prop spinners and propellers showed a slight decrease in vibrations as seen in the graph below. Something weird was noticed when balancing the gemfan propellers, it seemed that they would be heavier on one side of the hub. It was here that I decided to invest in more expensive APC propellers which as you can see made a huge difference and finally enabled loiter and the auto modes to work flawlessly.
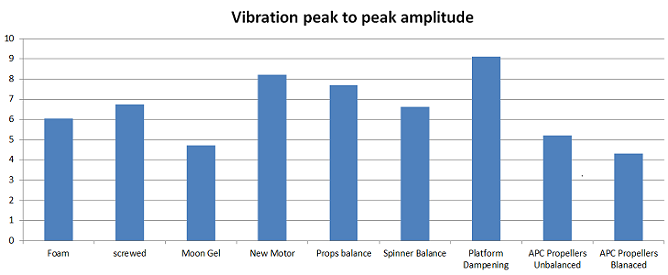
Relative vibration comparison