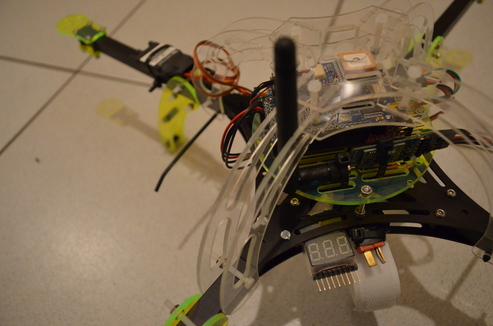
Before being able to do some wireless tests, the sensors and telemetry radio need to be powered. In this first phase of assembly, the power distribution board, IMU board along with the telemetry was mounted on the frame. Thereafter a single electronic speed controller was connected to power the IMU board and radio. As of now, the quadcopter is fully wireless and self-powered.

Motorless self powered quadcopter